
Polyphase Induction Motors MCQs Questions Answers:
Polyphase induction motors, also known as three-phase induction motors, are widely used in industrial and commercial applications for converting electrical energy into mechanical energy. They are robust, reliable, and efficient, making them the motor of choice for many high-power applications.
Here are some key features and concepts related to polyphase induction motors:
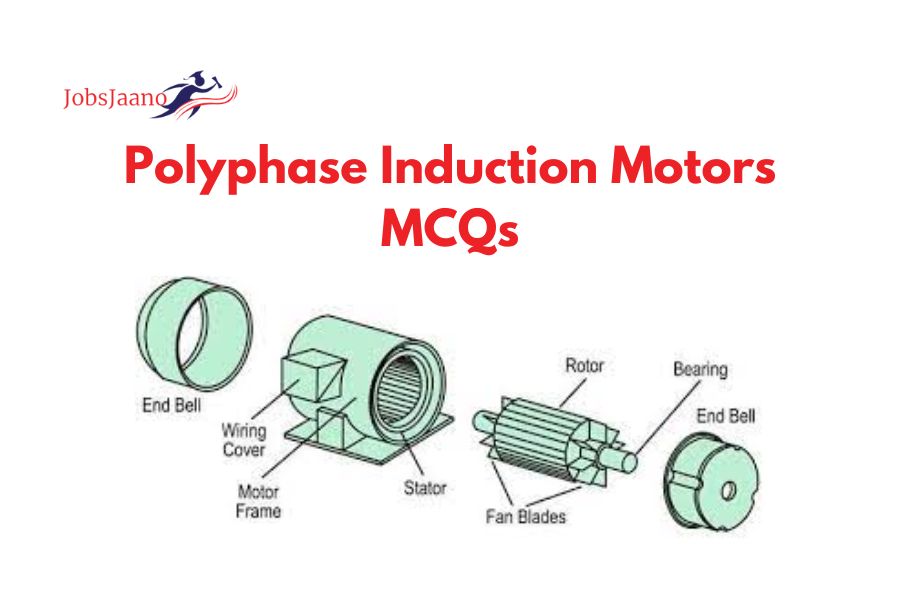
1. Construction: A polyphase induction motor consists of a stator and a rotor. The stator is the stationary part, which contains three sets of windings spaced 120 degrees apart, connected to a three-phase AC power supply. The rotor is the rotating part, typically made of laminated iron cores with conductive bars or “squirrel cage” conductors.
2. Working Principle: When a three-phase AC voltage is applied to the stator windings, it generates a rotating magnetic field. This magnetic field induces currents in the rotor conductors, creating a second magnetic field. The interaction between the rotating magnetic field of the stator and the induced magnetic field in the rotor causes the rotor to rotate, producing mechanical output.
3. Induction: The name “induction motor” comes from the process of electromagnetic induction. The rotating magnetic field in the stator induces voltage and current in the rotor windings, without any electrical connection between the stator and rotor. This induction action is responsible for the motor’s operation.
4. Squirrel Cage Rotor: Most polyphase induction motors employ a squirrel cage rotor design. The rotor consists of short-circuited conductive bars or “squirrel cage” conductors that form a closed loop. The rotor bars have a skewed or slotted arrangement to promote smoother rotation and reduce noise.
5. Speed Control: The speed of a polyphase induction motor is determined by the frequency of the applied voltage and the number of poles in the motor’s construction. The synchronous speed of the motor is directly proportional to the frequency and inversely proportional to the number of poles. Speed control of induction motors is typically achieved by adjusting the frequency of the power supply or by using variable frequency drives (VFDs).
6. Efficiency and Reliability: Polyphase induction motors are known for their high efficiency, reliability, and rugged construction. They have no brushes or commutators, which eliminates the need for maintenance associated with those components. The absence of physical contact between the stator and rotor allows for smoother operation and longer motor life.
Polyphase induction motors are widely used in various industrial applications such as pumps, fans, compressors, conveyors, machine tools, and many more. Their simplicity, efficiency, and ability to handle high power loads make them a popular choice for a wide range of motor-driven systems.
Polyphase Induction Motors MCQs | Induction Motor Multiple Choice Questions and Answers PDF
1. In a polyphase induction motor, the stator windings are connected to:
a) DC power supply
b) Single-phase AC power supply
c) Two-phase AC power supply
d) Three-phase AC power supply
Answer: d) Three-phase AC power supply
2. The rotating part of a polyphase induction motor is called:
a) Stator
b) Rotor
c) Armature
d) Commutator
Answer: b) Rotor
3. The most common type of rotor used in polyphase induction motors is:
a) Wound rotor
b) Squirrel cage rotor
c) Permanent magnet rotor
d) Slip ring rotor
Answer: b) Squirrel cage rotor
4. The speed of a polyphase induction motor is determined by:
a) Applied voltage
b) Number of poles
c) Stator resistance
d) Rotor capacitance
Answer: b) Number of poles
5. Induction motors operate based on the principle of:
a) Electromagnetic induction
b) Electromagnetic radiation
c) Electrostatic induction
d) Magnetic hysteresis
Answer: a) Electromagnetic induction
6. The efficiency of polyphase induction motors is generally:
a) Low
b) Medium
c) High
d) Variable
Answer: c) High
7. The speed control of polyphase induction motors is typically achieved by:
a) Adjusting the applied voltage
b) Changing the rotor resistance
c) Modifying the number of stator windings
d) Varying the frequency of the power supply
Answer: d) Varying the frequency of the power supply
8. Which of the following is not a common application of polyphase induction motors?
a) Pumps
b) Fans
c) Transformers
d) Conveyors
Answer: c) Transformers
9. The torque developed by a polyphase induction motor is directly proportional to:
a) Voltage
b) Frequency
c) Current
d) Power factor
Answer: c) Current
10. The starting torque of a polyphase induction motor can be increased by:
a) Increasing the voltage
b) Decreasing the number of poles
c) Adding external resistance in the rotor circuit
d) Increasing the power factor
Answer: c) Adding external resistance in the rotor circuit
3-Phase Induction Motor Questions and Answers PDF Download
11. The slip of a polyphase induction motor is defined as:
a) The difference between the synchronous speed and the rotor speed
b) The difference between the stator frequency and the rotor frequency
c) The difference between the stator voltage and the rotor voltage
d) The difference between the stator current and the rotor current
Answer: a) The difference between the synchronous speed and the rotor speed
12. Which of the following statements about polyphase induction motors is true?
a) They require brushes and commutators for operation.
b) They can only operate at synchronous speed.
c) They can operate at variable speeds without additional control methods.
d) They have a fixed number of poles.
Answer: d) They have a fixed number of poles.
13. The power factor of a polyphase induction motor is generally:
a) Leading
b) Lagging
c) Unity
d) Variable
Answer: b) Lagging
14. The running direction of a polyphase induction motor can be reversed by:
a) Changing the rotor resistance
b) Changing the stator voltage
c) Changing the direction of the rotating magnetic field
d) Changing the power factor
Answer: c) Changing the direction of the rotating magnetic field
15. The efficiency of a polyphase induction motor can be improved by:
a) Increasing the rotor resistance
b) Increasing the rotor current
c) Using higher-grade materials in the stator windings
d) Operating the motor close to its synchronous speed
Answer: d) Operating the motor close to its synchronous speed
16. Which of the following methods is used to control the speed of a polyphase induction motor?
a) Varying the voltage magnitude
b) Varying the rotor resistance
c) Varying the number of poles
d) Varying the supply frequency
Answer: d) Varying the supply frequency
17. The starting current of a polyphase induction motor is typically:
a) Higher than the full-load current
b) Lower than the full-load current
c) Equal to the full-load current
d) Unpredictable and varies widely
Answer: a) Higher than the full-load current
18. The efficiency of a polyphase induction motor is highest when operating at:
a) No-load
b) Full load
c) Half load
d) Overload
Answer: b) Full load
19. The primary advantage of polyphase induction motors over single-phase induction motors is:
a) Higher efficiency
b) Lower cost
c) Smaller size
d) Simpler construction
Answer: a) Higher efficiency
20. The speed of a polyphase induction motor can be controlled by varying the:
a) Voltage
b) Current
c) Power factor
d) Slip
Answer: d) Slip
Three Phase Induction Motor MCQ PDF | 3 Phase Induction Motor MCQ
21. The direction of rotation of a polyphase induction motor can be reversed by:
a) Changing the stator winding connections
b) Changing the rotor winding connections
c) Changing the supply frequency
d) Changing the number of poles
Answer: a) Changing the stator winding connections
22. The slip in a polyphase induction motor is highest when:
a) The motor is running at synchronous speed
b) The motor is running at full load
c) The motor is starting up
d) The motor is operating at half load
Answer: c) The motor is starting up
23. The power factor of a polyphase induction motor can be improved by:
a) Adding capacitors in parallel with the motor
b) Adding inductors in parallel with the motor
c) Changing the rotor resistance
d) Changing the supply voltage
Answer: a) Adding capacitors in parallel with the motor
24. The starting method that provides the highest starting torque for a polyphase induction motor is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Resistance starting
Answer: b) Star-delta starting
25. The rotor of a polyphase induction motor rotates at a speed:
a) Synchronous with the stator field
b) Higher than the synchronous speed
c) Lower than the synchronous speed
d) Equal to the rotor pole frequency
Answer: c) Lower than the synchronous speed
26. The type of speed control that allows a polyphase induction motor to maintain a constant torque is:
a) Volts-per-Hertz (V/f) control
b) Rotor resistance control
c) Field-oriented control (FOC)
d) Direct torque control (DTC)
Answer: a) Volts-per-Hertz (V/f) control
27. The most common type of polyphase induction motor used in industrial applications is the:
a) Squirrel cage induction motor
b) Wound rotor induction motor
c) Slip ring induction motor
d) Salient pole induction motor
Answer: a) Squirrel cage induction motor
28. The operating speed of a polyphase induction motor is determined by the:
a) Rotor resistance
b) Stator voltage
c) Slip
d) Number of poles
Answer: d) Number of poles
29. The phenomenon of slip in a polyphase induction motor is caused by:
a) Friction losses
b) Rotor windings resistance
c) Magnetic losses in the stator
d) Difference between synchronous and rotor speeds
Answer: d) Difference between synchronous and rotor speeds
30. The stator windings of a polyphase induction motor are typically made of:
a) Copper
b) Aluminum
c) Silver
d) Iron
Answer: a) Copper
MCQ on Polyphase Induction Motor
31. The starting method that reduces the high starting current in polyphase induction motors is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Resistance starting
Answer: b) Star-delta starting
32. The power factor of a polyphase induction motor can be improved by:
a) Adding resistors in series with the motor
b) Changing the supply frequency
c) Adding inductors in series with the motor
d) Using power factor correction capacitors
Answer: d) Using power factor correction capacitors
33. The torque-speed characteristic of a polyphase induction motor is:
a) Linear
b) Exponential
c) Parabolic
d) Hyperbolic
Answer: c) Parabolic
34. The component responsible for producing a rotating magnetic field in a polyphase induction motor is the:
a) Rotor
b) Stator
c) Frame
d) Commutator
Answer: b) Stator
35. The type of motor starting that provides the smoothest acceleration is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Variable frequency drive (VFD) starting
Answer: d) Variable frequency drive (VFD) starting
36. The efficiency of a polyphase induction motor is highest at:
a) No-load
b) Full load
c) Half load
d) Overload
Answer: b) Full load
37. The speed of a polyphase induction motor is proportional to the:
a) Voltage
b) Current
c) Power factor
d) Slip
Answer: a) Voltage
38. The type of polyphase induction motor that provides variable speed control is the:
a) Squirrel cage induction motor
b) Wound rotor induction motor
c) Slip ring induction motor
d) Salient pole induction motor
Answer: b) Wound rotor induction motor
39. The slip of a polyphase induction motor is expressed as a percentage and is defined as:
a) The ratio of stator voltage to rotor voltage
b) The ratio of rotor speed to synchronous speed
c) The ratio of stator current to rotor current
d) The ratio of rotor resistance to stator resistance
Answer: b) The ratio of rotor speed to synchronous speed
40. The frequency of the rotor current in a polyphase induction motor is:
a) Equal to the stator frequency
b) Higher than the stator frequency
c) Lower than the stator frequency
d) Variable and depends on the load
Answer: a) Equal to the stator frequency
41. The main advantage of a squirrel cage rotor over a wound rotor in polyphase induction motors is:
a) Higher efficiency
b) Higher starting torque
c) Higher speed control range
d) Higher power factor
Answer: a) Higher efficiency
42. The speed at which the rotor of a polyphase induction motor rotates in the absence of a load is known as:
a) Full load speed
b) Synchronous speed
c) No-load speed
d) Rated speed
Answer: b) Synchronous speed
43. The power factor of a polyphase induction motor can be defined as the:
a) Ratio of real power to apparent power
b) Ratio of reactive power to apparent power
c) Ratio of real power to reactive power
d) Ratio of apparent power to real power
Answer: a) Ratio of real power to apparent power
44. The term “slip” in a polyphase induction motor refers to:
a) The difference between the stator and rotor voltages
b) The electrical resistance of the rotor windings
c) The mechanical losses in the motor
d) The difference between the synchronous and rotor speeds
Answer: d) The difference between the synchronous and rotor speeds
45. The starting torque of a polyphase induction motor is typically:
a) Equal to the full-load torque
b) Less than the full-load torque
c) Greater than the full-load torque
d) Unpredictable and varies widely
Answer: c) Greater than the full-load torque
46. The type of motor commonly used to drive high-inertia loads in polyphase induction motors is:
a) Squirrel cage induction motor
b) Wound rotor induction motor
c) Slip ring induction motor
d) Single-phase induction motor
Answer: b) Wound rotor induction motor
47. The number of stator poles in a polyphase induction motor determines the:
a) Rated voltage of the motor
b) Maximum torque produced by the motor
c) Synchronous speed of the motor
d) Efficiency of the motor
Answer: c) Synchronous speed of the motor
48. The type of starting method that uses reduced voltage to start a polyphase induction motor is:
a) Autotransformer starting
b) Star-delta starting
c) Resistance starting
d) Reactance starting
Answer: a) Autotransformer starting
49. The speed of a polyphase induction motor under normal operating conditions is:
a) Higher than synchronous speed
b) Equal to synchronous speed
c) Lower than synchronous speed
d) Variable depending on load
Answer: c) Lower than synchronous speed
50. The main purpose of the rotor slots in a polyphase induction motor is to:
a) Enhance rotor cooling
b) Reduce rotor losses
c) Increase rotor efficiency
d) Facilitate rotor winding insertion
Answer: d) Facilitate rotor winding insertion
51. The type of starting method that initially applies a high starting voltage to the motor is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Reactance starting
Answer: c) Autotransformer starting
52. The term “slip frequency” in a polyphase induction motor refers to the:
a) Frequency of the rotor current
b) Frequency of the stator current
c) Frequency of the electromagnetic field
d) Frequency of the slip
Answer: a) Frequency of the rotor current
53. The type of rotor used in a slip ring induction motor is:
a) Squirrel cage rotor
b) Wound rotor
c) Salient pole rotor
d) Permanent magnet rotor
Answer: b) Wound rotor
54. The number of phases in a polyphase induction motor is typically:
a) One
b) Two
c) Three
d) Four
Answer: c) Three
55. The torque-speed characteristic of a polyphase induction motor is typically:
a) Linear
b) Exponential
c) Parabolic
d) Hyperbolic
Answer: c) Parabolic
56. The type of bearing commonly used in polyphase induction motors is:
a) Sleeve bearing
b) Roller bearing
c) Ball bearing
d) Thrust bearing
Answer: c) Ball bearing
57. The type of motor starting method that is suitable for high starting torque applications is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Reactance starting
Answer: b) Star-delta starting
58. The effect of increasing the number of poles in a polyphase induction motor is to:
a) Increase the torque
b) Increase the speed
c) Increase the power factor
d) Decrease the efficiency
Answer: b) Increase the speed
59. The slip in a polyphase induction motor is defined as:
a) The difference between the stator and rotor voltages
b) The ratio of the stator and rotor currents
c) The difference between the synchronous and rotor speeds
d) The ratio of the rotor speed to synchronous speed
Answer: c) The difference between the synchronous and rotor speeds
60. The type of motor starting method that reduces the starting current and torque in a polyphase induction motor is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Reactance starting
Answer: b) Star-delta starting
61. The rotor resistance in a polyphase induction motor affects:
a) The motor efficiency
b) The motor speed
c) The motor torque
d) The motor power factor
Answer: c) The motor torque
62. The main advantage of a slip ring induction motor over a squirrel cage induction motor is:
a) Higher efficiency
b) Higher starting torque
c) Higher speed control range
d) Higher power factor
Answer: c) Higher speed control range
63. The phenomenon of cogging in a polyphase induction motor results in:
a) Unwanted noise and vibration
b) Reduced torque production
c) Increased power factor
d) Higher efficiency
Answer: a) Unwanted noise and vibration
64. The type of speed control method commonly used in polyphase induction motors is:
a) Stator voltage control
b) Rotor resistance control
c) Stator frequency control
d) Rotor flux control
Answer: c) Stator frequency control
65. The starting torque of a polyphase induction motor is typically:
a) Equal to the full-load torque
b) Less than the full-load torque
c) Greater than the full-load torque
d) Unpredictable and varies widely
Answer: c) Greater than the full-load torque
66. The type of winding used in the stator of a polyphase induction motor is:
a) Concentrated winding
b) Distributed winding
c) Lap winding
d) Wave winding
Answer: b) Distributed winding
67. The speed control of a polyphase induction motor is achieved by varying the:
a) Stator voltage
b) Rotor voltage
c) Stator current
d) Rotor current
Answer: a) Stator voltage
68. The type of rotor used in a squirrel cage induction motor is:
a) Wound rotor
b) Salient pole rotor
c) Permanent magnet rotor
d) Cage rotor
Answer: d) Cage rotor
69. The type of motor commonly used in household appliances and small machinery is:
a) Synchronous motor
b) Induction motor
c) DC motor
d) Stepper motor
Answer: b) Induction motor
70. The purpose of the rotor bars in a squirrel cage induction motor is to:
a) Enhance rotor cooling
b) Reduce rotor losses
c) Increase rotor efficiency
d) Facilitate rotor current flow
Answer: d) Facilitate rotor current flow
71. The type of starting method that reduces the starting current and torque in a polyphase induction motor is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Autotransformer starting
d) Resistance starting
Answer: b) Star-delta starting
72. The power factor of an ideal polyphase induction motor is:
a) Zero
b) Unity (1.0)
c) Positive
d) Negative
Answer: b) Unity (1.0)
73. The torque-speed characteristic of an induction motor is primarily determined by its:
a) Stator resistance
b) Stator inductance
c) Rotor resistance
d) Rotor reactance
Answer: c) Rotor resistance
74. The purpose of the air gap in a polyphase induction motor is to:
a) Prevent heat buildup
b) Increase motor efficiency
c) Provide insulation
d) Create a magnetic flux path
Answer: d) Create a magnetic flux path
75. The type of motor commonly used for high-speed applications in polyphase induction motors is:
a) Squirrel cage induction motor
b) Wound rotor induction motor
c) Permanent magnet induction motor
d) Brushless induction motor
Answer: c) Permanent magnet induction motor
76. The efficiency of a polyphase induction motor is highest at:
a) No-load
b) Full load
c) Half load
d) Overload
Answer: b) Full load
77. The type of motor starting method that provides the smoothest acceleration and torque control is:
a) Direct-on-line (DOL) starting
b) Star-delta starting
c) Variable frequency drive (VFD) starting
d) Autotransformer starting
Answer: c) Variable frequency drive (VFD) starting
78. The number of poles in a polyphase induction motor determines its:
a) Speed
b) Efficiency
c) Power factor
d) Torque
Answer: a) Speed